

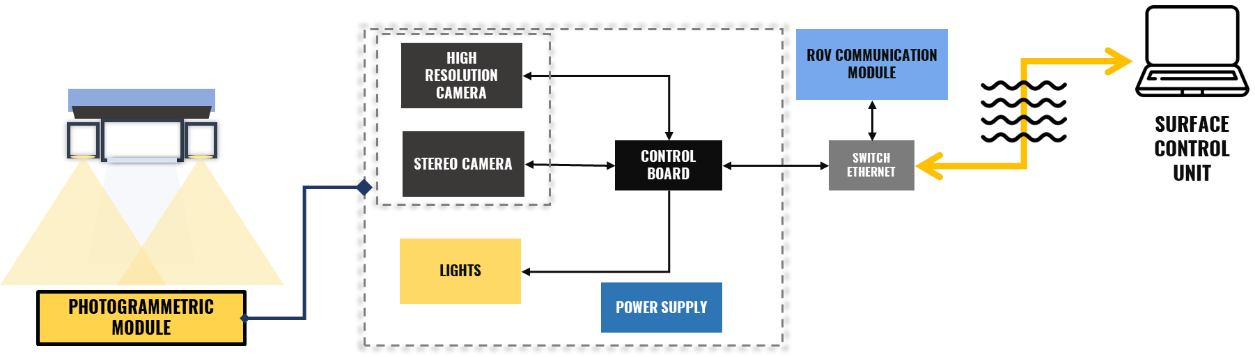
Workpackage 4.0 concerns the development of a robotic platform for the inspection, documentation, and monitoring of underwater cultural heritage sites. In this context, Umberto Severino (UNICAL) explained the methodology used in designing the integration of components on the underwater robotic platform. He shared his consolidated expertise acquired during his previous activities as a mechanical designer of underwater components, including the design of the watertight enclosure for an acoustic modem integrated into an underwater tablet.
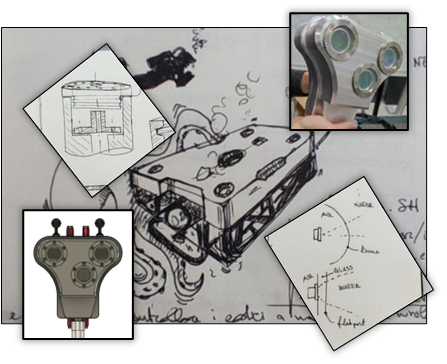
The approach employed takes advantage of a user-centered design to meet the needs of the various professionals involved in the project. During the presentation, the emphasis was placed on defining the requirements and specifications, starting from the use case scenario as a foundation for the architecture design. Subsequently, the mechanical design of the functional prototype of the watertight enclosure for the optical module of the robotic platform was presented.
Knowledge sharing was not conducted in a single day but throughout the entire secondment period, exchanging opinions and considerations with the personnel from LABUST and H2O Robotics involved in the design of mechanical components such as floaters, watertight enclosures, and ROV payloads.
During his secondment, Umberto took the opportunity to have a workstation in the laboratory used by the engineers and collaborators of H2O Robotics for prototype development, design, and machining, thus creating a more direct connection with the reality of the hosting institution.

Leave a Reply